MultiRobot-Distribution-Matching
Official implementation of the paper “Optimal Transport-Based Decentralized Multi-Agent Distribution Matching”, published in IEEE Transactions on Automatic Control (TAC), 2026.
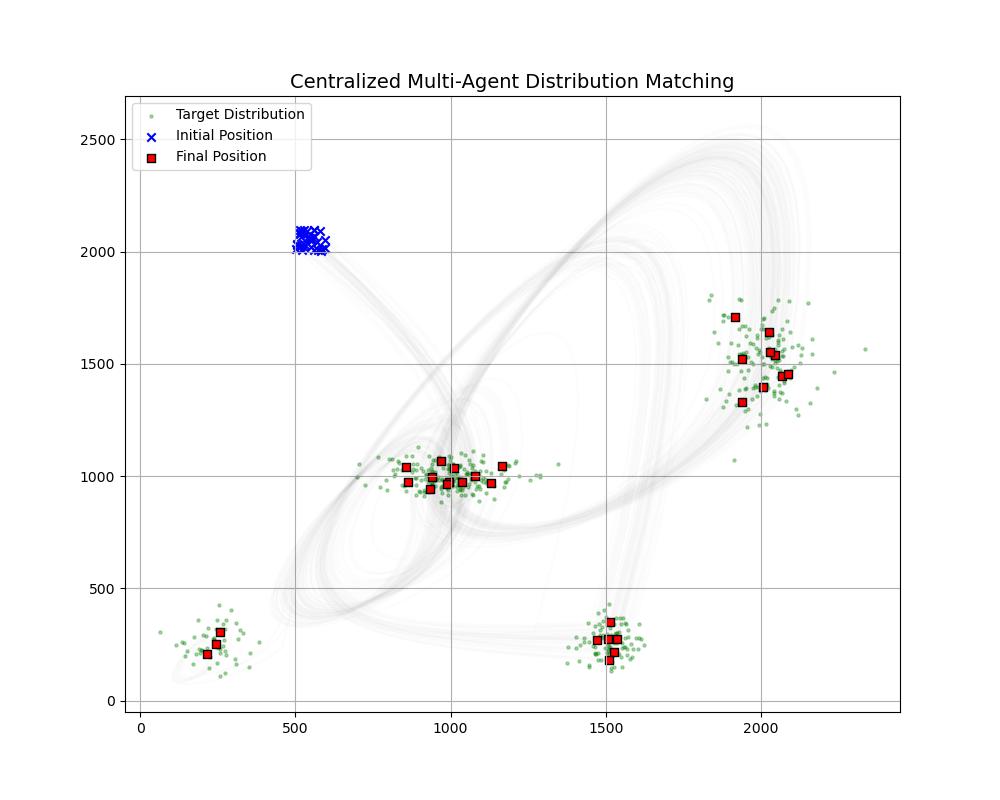
This repository provides robust control algorithms for multi-robot systems to achieve target distribution matching using Optimal Transport theory.
Links
- Paper (IEEE): 10.1109/TAC.2026.3668445
- Paper (arXiv): arXiv:2601.00548
Repository Overview
We provide implementations for both centralized and decentralized scenarios:
- centralized_main.py: Solves the global optimal transport problem sequentially to determine the optimal target position for each robot.
- decentralized_main.py: Implements a memory-augmented min-consensus algorithm for scenarios with limited local communication.
Core Dynamics
This implementation applies optimal control based on linear time-invariant (LTI) system dynamics. The control inputs are computed iteratively over a planning horizon $T$. After $T$ steps, the control weights are re-initialized, and the process repeats to achieve convergence to the target distribution.
Nonlinear Control-Affine Dynamics
For the development of control-affine nonlinear dynamics, please refer to the main paper.
Installation & Usage
Requirements
- Python 3.8+
- numpy
- matplotlib
Run Simulations
# Run centralized simulation
python centralized_main.py
# Run decentralized simulation
python decentralized_main.py
License
This code is provided for academic research purposes only. Commercial use is strictly prohibited. See the LICENSE file for details.